Control Básico del motor:
Debíamos hacer rotar un motor por 3 métodos diferentes.
Primero debíamos hacer girar un motor hasta que se pulsara un botón cualquiera. Despues debía girar 45 grados mediante el método rotate(), y por ultimo, lo mismo pero utilizando el método rotateTo()
Los 3 códigos sin problemas, aunque parecía que con 45 grados el motor se movería un poco más.
Visualización de la odometría del motor:
Aqui debíamos mostrar la odometría interna (el ángulo de giro) de un motor que movíamos de forma manual.
En las primeras pruebas mostraba cifras extrañas, por encima del millar, e intentamos arreglarlo con un "% 360" (módulo 360), pero segía mostrando números por encima de 360 grados. Al final resultó que pintaba unos números por encima de otros, y al pasar de uno de 3 cifras a uno de dos, la última cifra se quedaba intacta. Para solucionarlo hicimos que el LCD se limpiara en cada vuelta del bucle, lo que hace que los números se visualicen de forma vibrante y "a trozos".
Cuadrado de calibración de movimiento:
Sobre el papel, dibujamos un cuadrado de 40 por 40 cm. Para realizar las pruebas simplemente colocábamos a Trocolo sobre una de las esquinas.
El robot no se mueve de forma perpendicular al eje de las ruedas, con lo cual la primera fuente de desviación a la hora de dibujar el cuadrado era que la linea de salida ya estaba desviada de la trayectoria ideal.
Además los ángulos no son exactamente de 90, así que la posición final nunca es exáctamente igual a la inicial, aunque si bastante próxima.
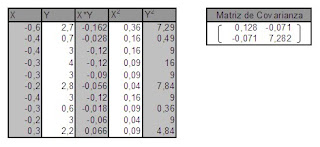
Matriz de covarianza:
Para realizar la matriz de covarianza dibujamos una linea recta de un metro sobre cartulina.
Despues hicimos recorrer 10 veces dicha linea al robot, anotando la desviación lateral como variable Y y la longitudinal como X.
Visualización de la trayectoria. La última parte de la práctica consistía en mostrar por la pantalla del NXT los valores de X, de Y y de el ángulo total durante el recorrido del cuadrado.
Hemos tenido que crear dos variables auxiliares X0 e Y0 para que acumulasen los valores de x e y al cambiar de lado.
Debíamos hacer rotar un motor por 3 métodos diferentes.
Primero debíamos hacer girar un motor hasta que se pulsara un botón cualquiera. Despues debía girar 45 grados mediante el método rotate(), y por ultimo, lo mismo pero utilizando el método rotateTo()
Los 3 códigos sin problemas, aunque parecía que con 45 grados el motor se movería un poco más.
Visualización de la odometría del motor:
Aqui debíamos mostrar la odometría interna (el ángulo de giro) de un motor que movíamos de forma manual.
En las primeras pruebas mostraba cifras extrañas, por encima del millar, e intentamos arreglarlo con un "% 360" (módulo 360), pero segía mostrando números por encima de 360 grados. Al final resultó que pintaba unos números por encima de otros, y al pasar de uno de 3 cifras a uno de dos, la última cifra se quedaba intacta. Para solucionarlo hicimos que el LCD se limpiara en cada vuelta del bucle, lo que hace que los números se visualicen de forma vibrante y "a trozos".
Cuadrado de calibración de movimiento:
Sobre el papel, dibujamos un cuadrado de 40 por 40 cm. Para realizar las pruebas simplemente colocábamos a Trocolo sobre una de las esquinas.
El robot no se mueve de forma perpendicular al eje de las ruedas, con lo cual la primera fuente de desviación a la hora de dibujar el cuadrado era que la linea de salida ya estaba desviada de la trayectoria ideal.
Además los ángulos no son exactamente de 90, así que la posición final nunca es exáctamente igual a la inicial, aunque si bastante próxima.
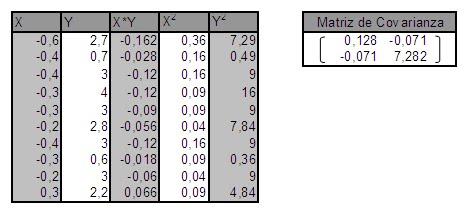
Matriz de covarianza:
Para realizar la matriz de covarianza dibujamos una linea recta de un metro sobre cartulina.
Despues hicimos recorrer 10 veces dicha linea al robot, anotando la desviación lateral como variable Y y la longitudinal como X.
Visualización de la trayectoria. La última parte de la práctica consistía en mostrar por la pantalla del NXT los valores de X, de Y y de el ángulo total durante el recorrido del cuadrado.
Hemos tenido que crear dos variables auxiliares X0 e Y0 para que acumulasen los valores de x e y al cambiar de lado.
No hay comentarios:
Publicar un comentario